Github 倉儲頁面 <<
Previous Next >> CAD1繪圖
HW1
HW1 佔學期績效 25%
HW1必須在2021.11.10 22:00之前完成。
HW1具體項目成果回報區將於2021.09.23開啟,於2021.11.10 22:00關閉。
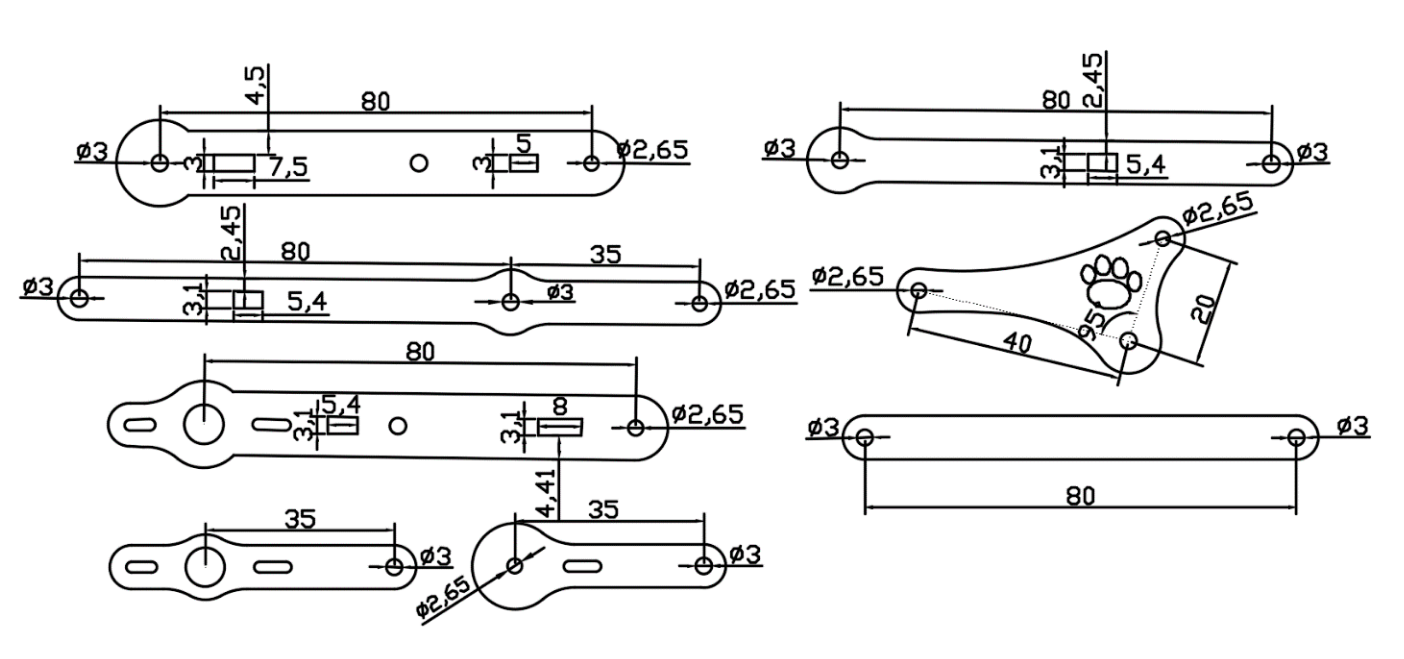
作業一:meArm機器人零件繪圖與機電運動模擬場景製作
Step1:下載meARM.7z這個包含未完成組立的meArm Robot場景與雷射切割粒子組立手冊。
meArm_75-0040_v1.pdf則是另外一本組立參考手冊。
Step2:從課程網頁中的Compile CoppeliaSim頁面,下載coppeliaSim 4.1.0官方版與MSYS2編譯版.7z(檔案大小412 MB,解開壓縮後1GB)可攜套件。
Step3:在HW1中,要求每一位展開程序亂數分配(兩班實際亂數分配結果以上的課程)所使用的兩套參數式CAD套件,從軟體發展緣開始進行介紹、經過教育版軟體套件檔案的取得、下載安裝以及配置使用。可知Step1中的零件尺寸,逐一完成我的手臂機器人各零件繪製與組立。鋸縫匯入CoppeliaSim 進行整體配置後,以UI介面中的滑塊控制meArm Robot各軸的旋轉作動。
2b CAD套件分配結果:https ://mde.tw/cad2021/downloads/online/2b_hw1_cad.txt
附件:
1. CAD套件分配表:
sw:Solidworks,inv:Inventor,nx:NX12,ons:Onshape,slvs:Solvespace
2a 套裝亂數分配結果
2b 套裝亂數分配結果
2.在兩套CAD完成零件繪圖並轉入CoppeliaSim後,為了建立動態模型必須利用形狀編輯模式轉為乾淨模型,並與實際轉入的STL格式零件外形結合應用後建立模擬場景(場景)。
3. meARM機器人動態模擬場景的建構,可參考0,1,2,3,4,5,6,7,也可參考Uarm機器人模型與相關影片。
4. CoppeliaSim設計動態模擬說明頁面。
5.網際Lua程序執行。
6. meArm.slvs , meArm_in_solvespace.slvs
7. UI介面程序參考:
函數 closeEventHandler(h)
sim.addLog(sim.verbosity_scriptinfos,'窗口'..h..'正在關閉......')
simUI.hide(h)
結尾
函數joint1_rotate(ui,id,newVal)
simUI.setLabelText(ui,3000,'theta1 設置為'..newVal)
sim.setJointTargetPosition(joint1, newVal*deg)
結尾
函數joint2_rotate(ui,id,newVal)
simUI.setLabelText(ui,3000,'theta2 設置為'..newVal)
sim.setJointTargetPosition(joint2, newVal*deg)
結尾
函數joint3_rotate(ui,id,newVal)
simUI.setLabelText(ui,3000,'theta3 設置為'..newVal)
sim.setJointTargetPosition(joint3, newVal*deg)
結尾
函數joint16_rotate(ui,id,newVal)
simUI.setLabelText(ui,3000,'theta16 設置為'..newVal)
sim.setJointTargetPosition(joint16, newVal*deg)
sim.setJointTargetPosition(joint20, -newVal*deg)
結尾
函數 sysCall_init()
-- 在這裡做一些初始化
關節 1 = sim.getObjectHandle('motor1')
Joint2 = sim.getObjectHandle('motor2')
Joint3 = sim.getObjectHandle('motor3')
Joint16 = sim.getObjectHandle('motor16')
Joint20 = sim.getObjectHandle('motor20')
我 = 0
度 = math.pi/180
打印(一)
xml = [[
<ui closeable="true" on-close="closeEventHandler" resizable="true">
" <label text="這是 CustomUI 插件的演示。瀏覽下面的選項卡以探索可以使用該插件創建的所有小部件。wordwrap="true" />
<標籤>
<tab title="數字">a
" <label text="滑塊可以水平或垂直定向,並且具有可以設置的可選屬性(在 XML 中),例如最小值和最大值。wordwrap="true" />
<label text="" id="3000" wordwrap="true" />
<label text="theta1" /> <hslider tick-position="above" tick-interval="1"
minimum="0" maximum="360" on-change="joint1_rotate" />
<label text="theta2" /> <hslider tick-position="above" tick-interval="1"
最小值="-90" 最大值="65" on-change="joint2_rotate" />
<label text="theta3" /> <hslider tick-position="above" tick-interval="1"
最小值="-90" 最大值="185" on-change="joint3_rotate" />
<label text="theta16" /> <hslider tick-position="above" tick-interval="1"
minimum="0" maximum="15" on-change="joint16_rotate" />
</tab>
</標籤>
</ui>
]]
ui=simUI.create(xml)
結尾
(來自:2016_ADDITIVE MANUFACTURING PROCESSES FOR FABRICATING A MINI ROBOOT - 計算模型和實驗結果.pdf)
Github 倉儲頁面 <<
Previous Next >> CAD1繪圖